Design, simulation, fabrication and control a 3-DOF planar robotic manipulator
| Abstract | This paper aims to study how to fabricate, simulate and control a 3-degree of freedom (DOFs) robot arm that moves flexibly in a plane. First, the design process of the 3-DOFs robot arm model is done on the Solidworks platform. Next, the simulation and calculation of the PD controller of the robot arm are implemented on Matlab-Simulink with Simscape Multibody library to evaluate the effectiveness of the model and the control design. Then, the real model of the robot arm is fabricated with the control box. Finally, a real robot arm was controlled to move following the reference in the plane with the PD controller embedded on the STM32F4 microcontroller and collected data about the computer. By applying this procedure in robot design, it helps to not only minimize the cost and time but also improve the efficiency in the controller design for the robot. |
| Item Type | Journal Article |
| Title | Design, simulation, fabrication and control a 3-DOF planar robotic manipulator |
| Author | Tran Dinh Hoa Nguyen Van Khiem Tran Duc Thien |
| Publication | Journal of Technical Education Science |
| Page | 40-47 |
| Date | 2021-6-30 |
| Journal Abbr | JTE |
| ISSN | 2615-9740 |
| Language | Vietnam |
| URL | https://jte.hcmute.edu.vn/index.php/jte/article/view/87 |
| Library Catalog | DOI.org (Crossref) |
| Tags | PD Control, kinematic analysis, Simscape Multibody, 3-DOF planar robotic manipulator |
Related Posts
-
 New Release!! Waijung 2 for ESP32 ver. 22.4b
New Release!! Waijung 2 for ESP32 ver. 22.4b
-
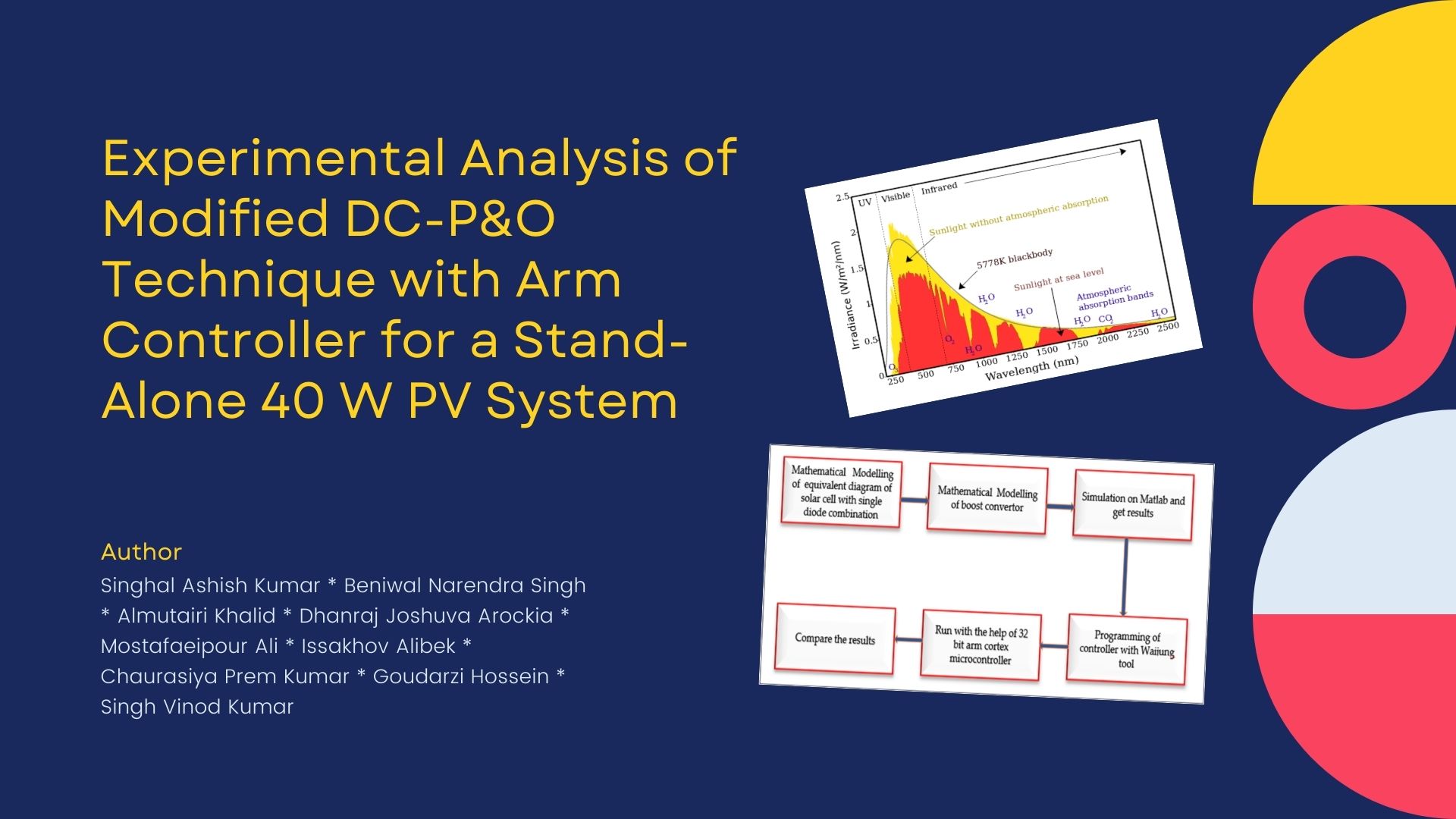 Experimental Analysis of Modified DC-P&O Technique with Arm Controller for a Stand-Alone 40 W PV System
Experimental Analysis of Modified DC-P&O Technique with Arm Controller for a Stand-Alone 40 W PV System
-
 Development of a Home Temperature Control Unit based on a Model Predictive Control Strategy
Development of a Home Temperature Control Unit based on a Model Predictive Control Strategy
-
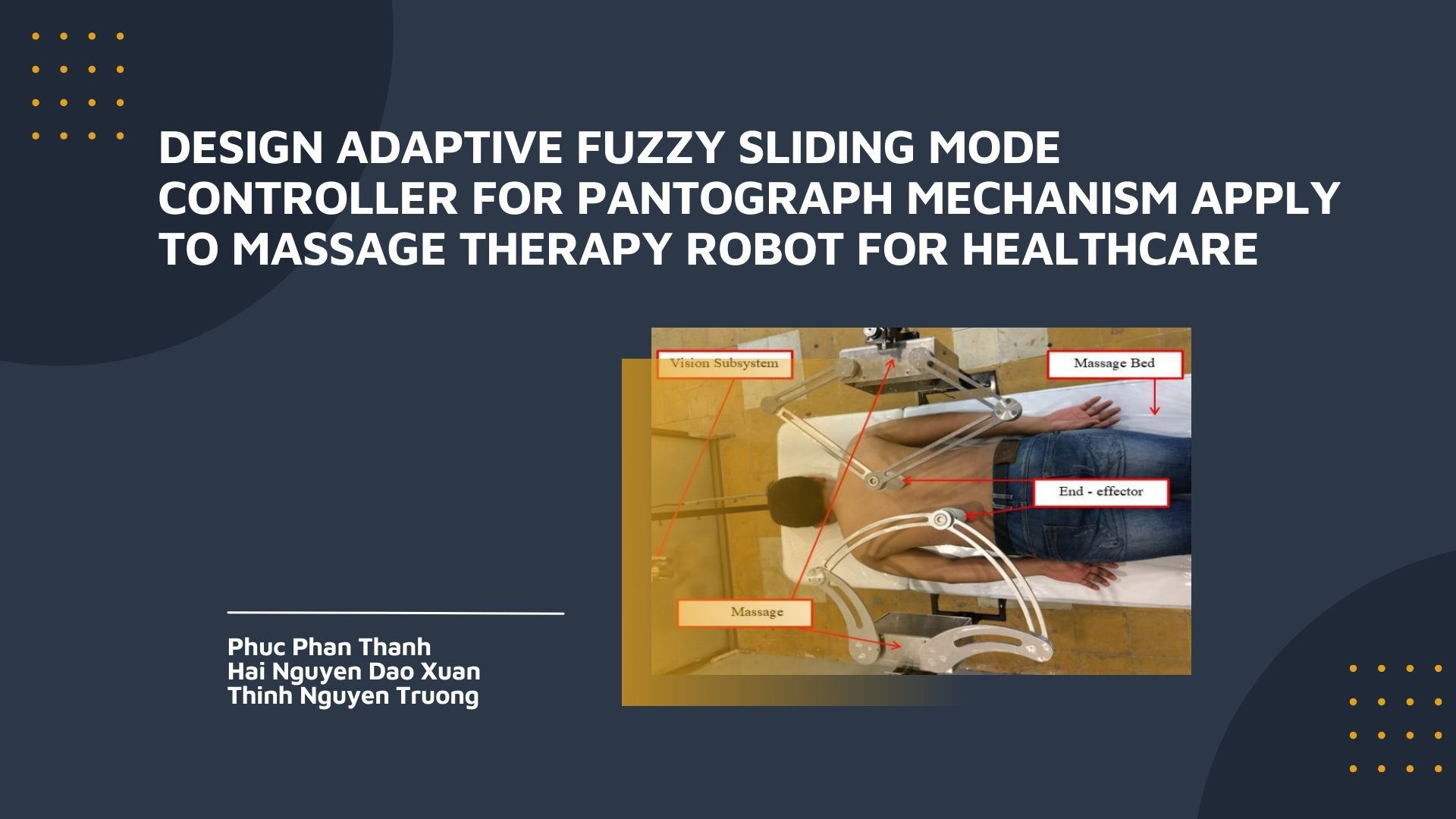 Design Adaptive Fuzzy Sliding Mode Controller for Pantograph Mechanism Apply to Massage Therapy Robot for Healthcare
Design Adaptive Fuzzy Sliding Mode Controller for Pantograph Mechanism Apply to Massage Therapy Robot for Healthcare
Related Products
-
 Waijung 2 for ESP32As low as ฿4,500.00
Waijung 2 for ESP32As low as ฿4,500.00
Recent Posts
-
 Aimagin IoT Solution
Aimagin IoT Solution
-
 Aimagin Analytics KPI - แนะนำระบบติดตามและประเมินตัวชี้วัด (KPI)
Aimagin Analytics KPI - แนะนำระบบติดตามและประเมินตัวชี้วัด (KPI)
-
 Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (Balancing robot controller project-based learning)
Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (Balancing robot controller project-based learning)
-
 Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (RC-circuit controller project-based learning)
Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (RC-circuit controller project-based learning)
-
 Project 1B "Deploying Simulink and State flow to ESP32 using Waijung 2"
Project 1B "Deploying Simulink and State flow to ESP32 using Waijung 2"



