Control the Position of the Conveyer Belt using MATLAB/Simulink and Waijung 2 for ESP32
Machine conveying is popular for working in industrial systems rather than using a transporter because it is convenient, continuous, precise, and able to transport products regularly. Looking back at the origin for these machines to work as needed, it has been well thought out by engineers to make it easy, convenient and fast through Waijung 2 for ESP32.
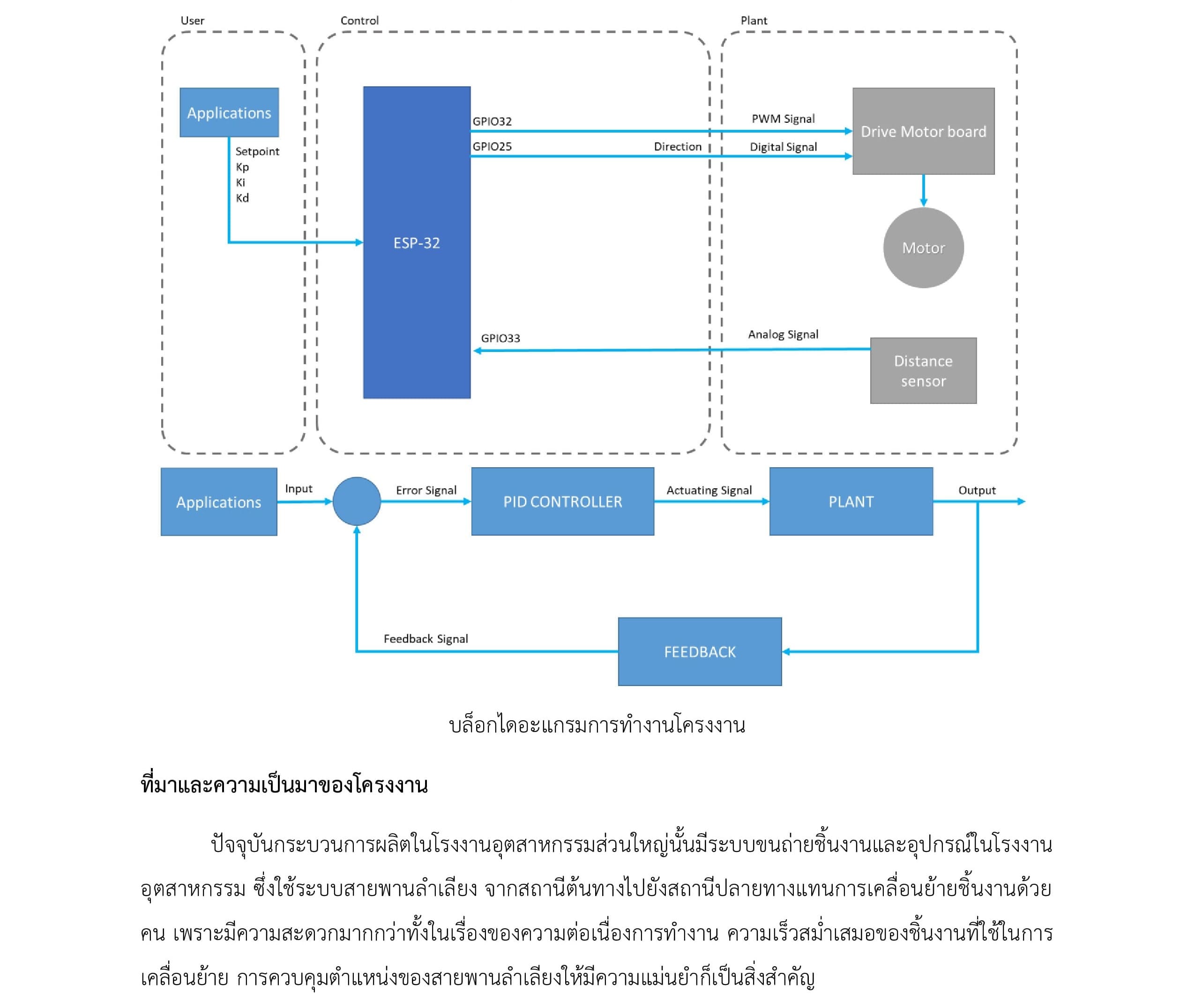
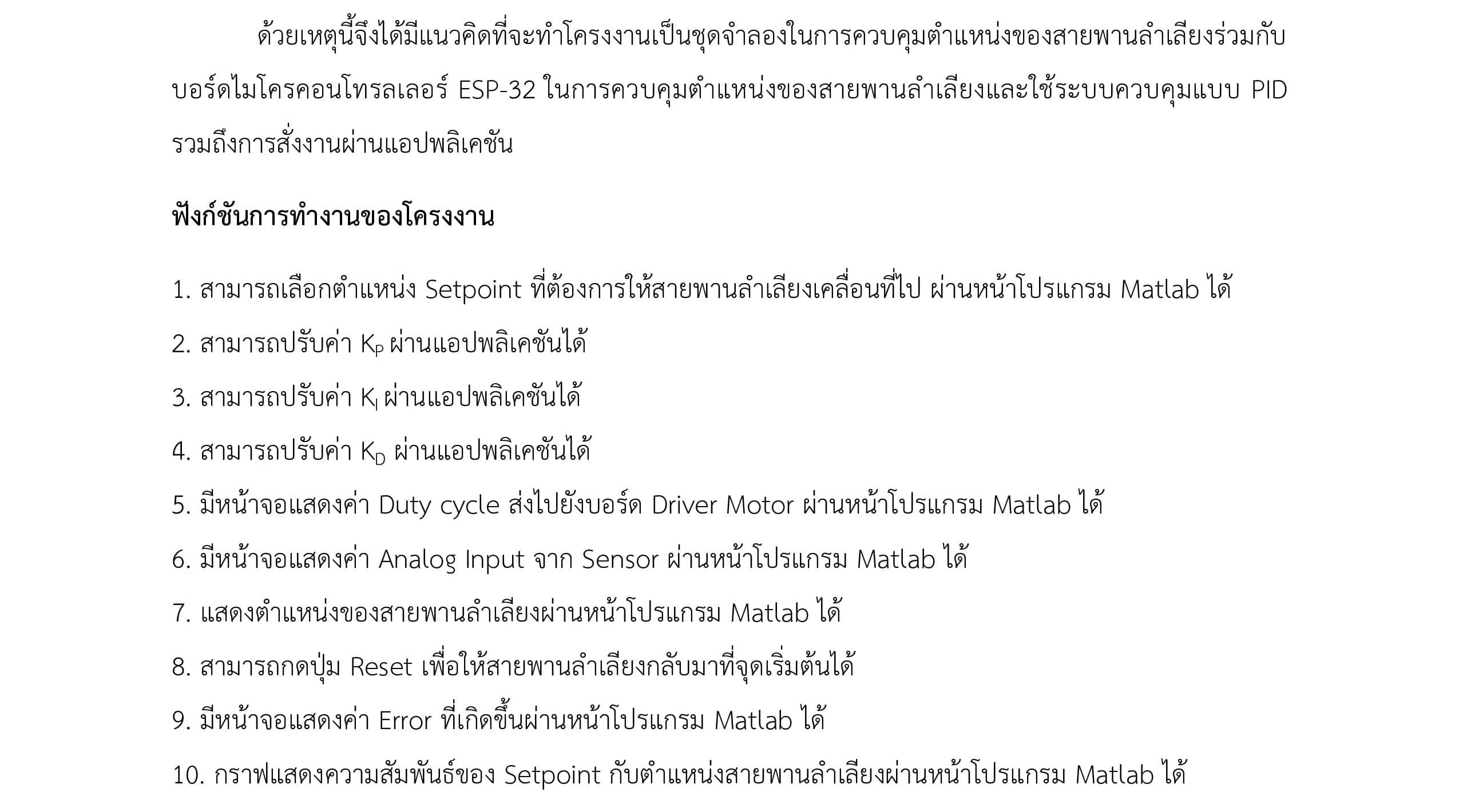
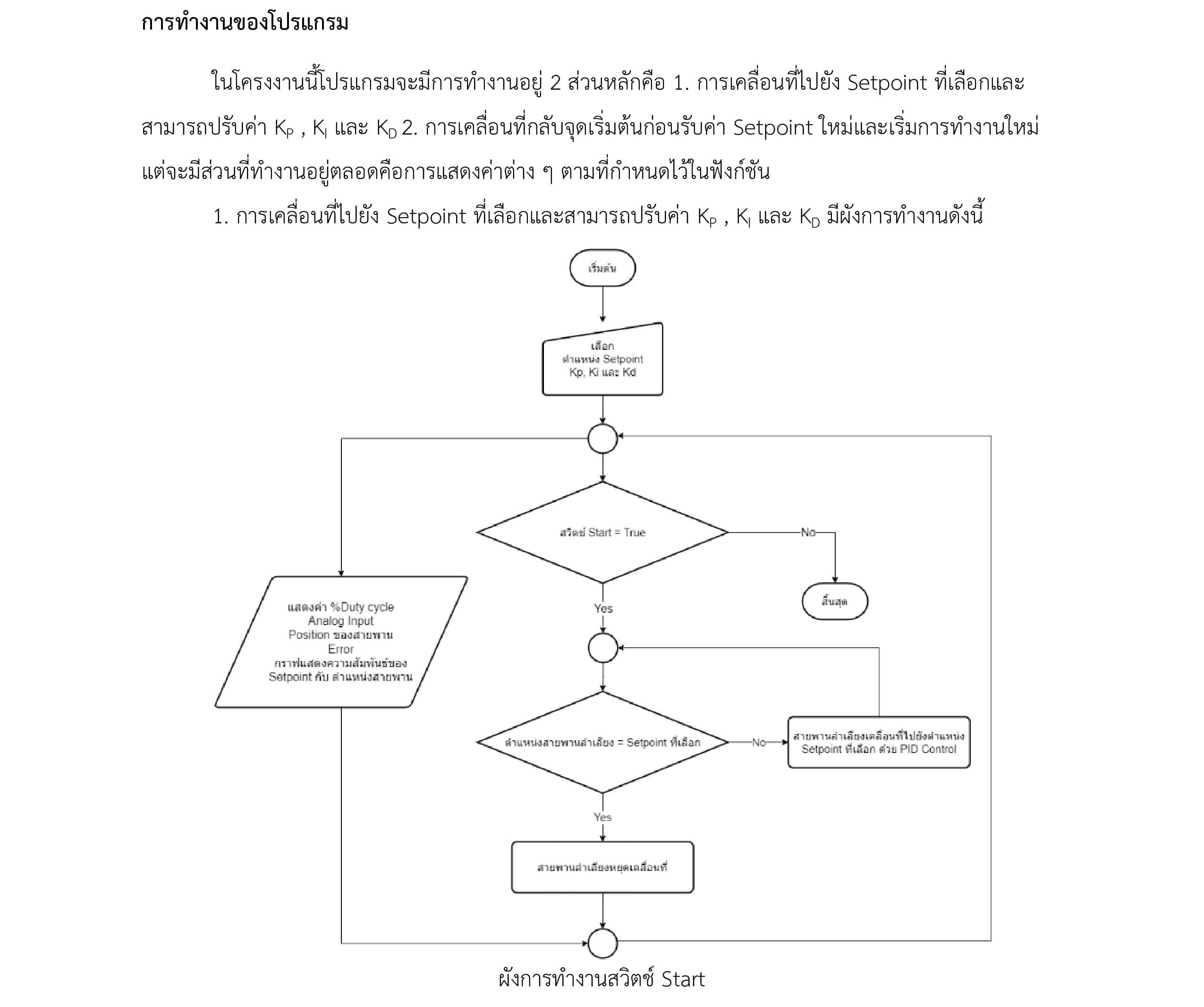
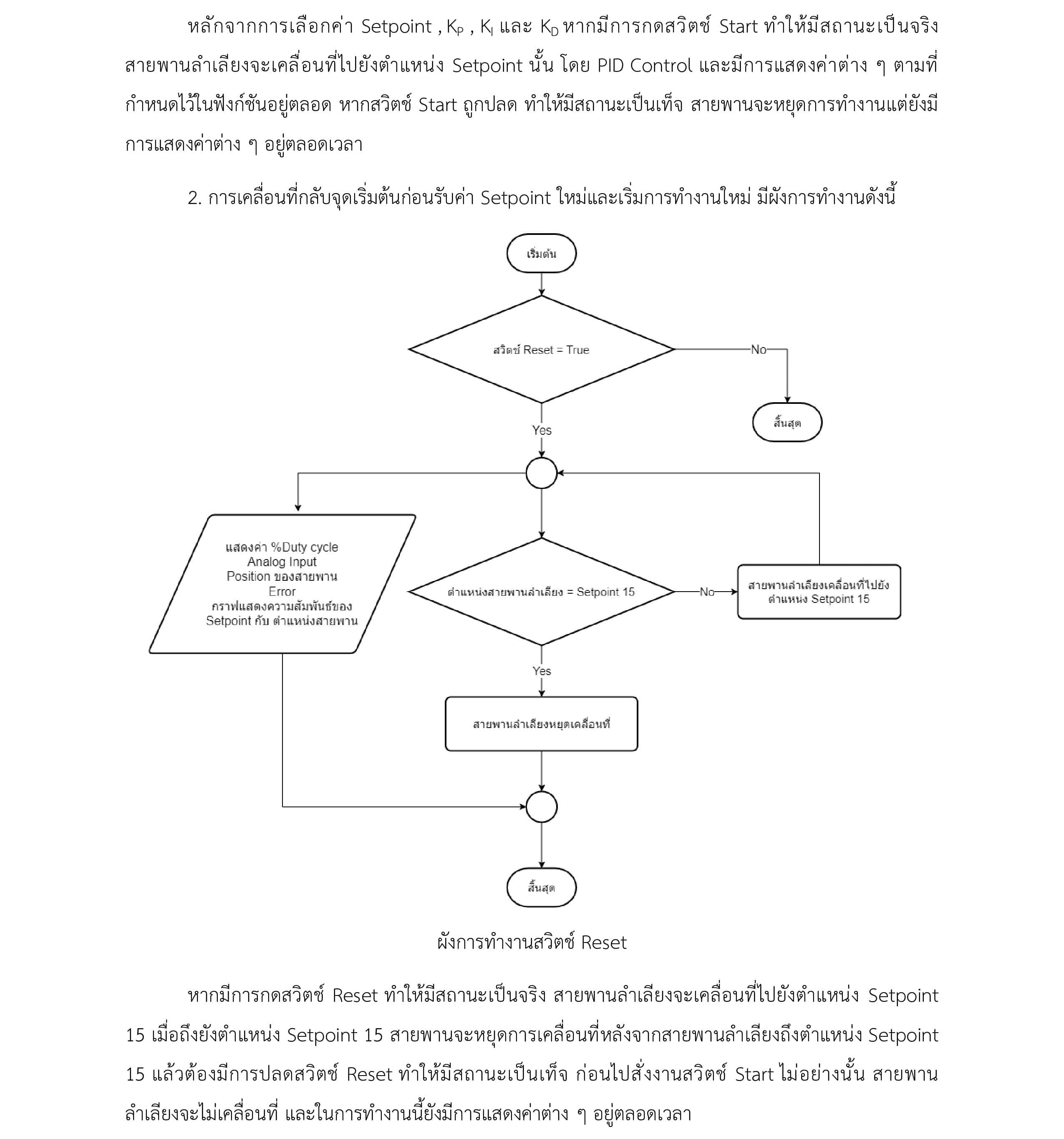
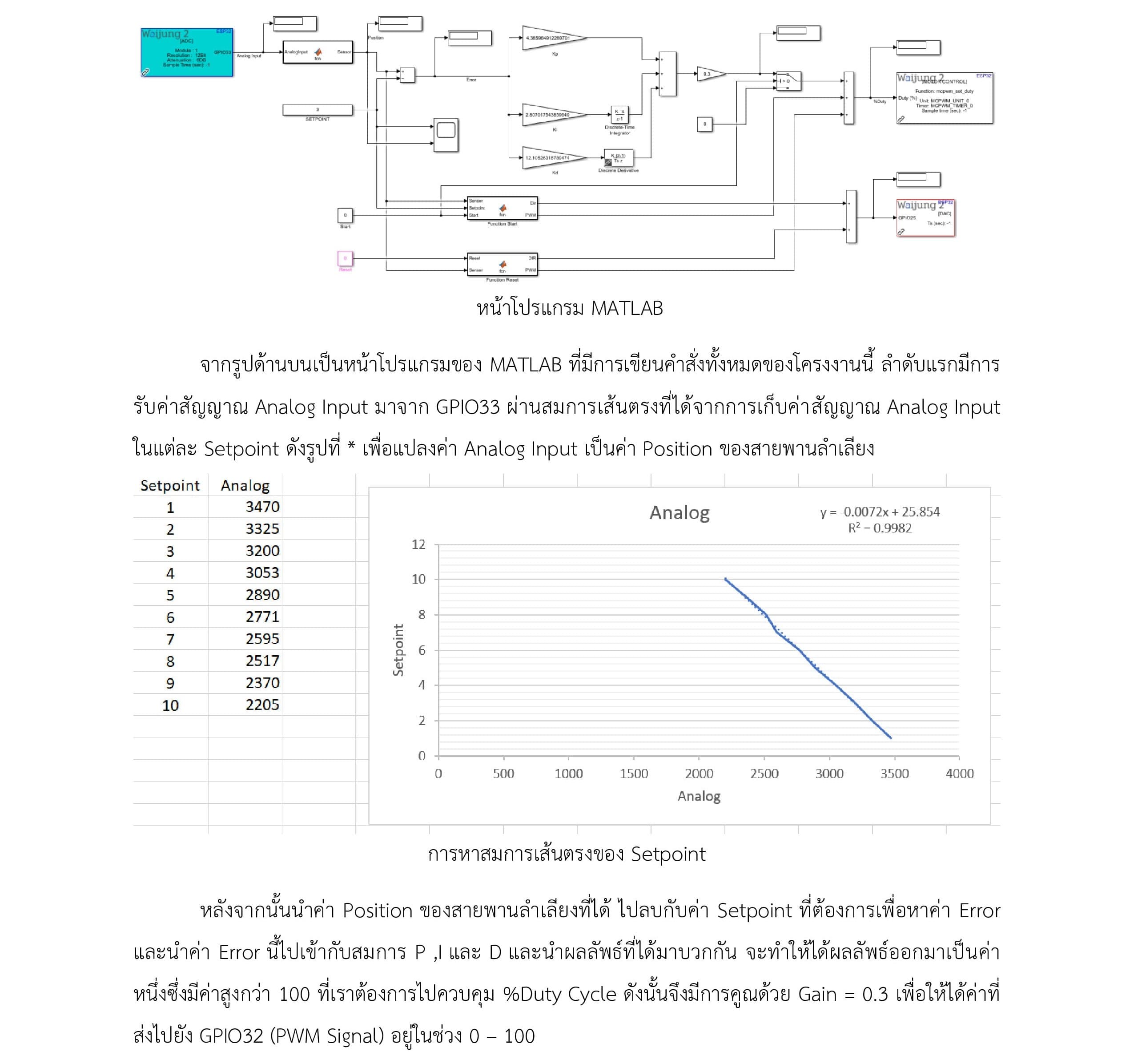
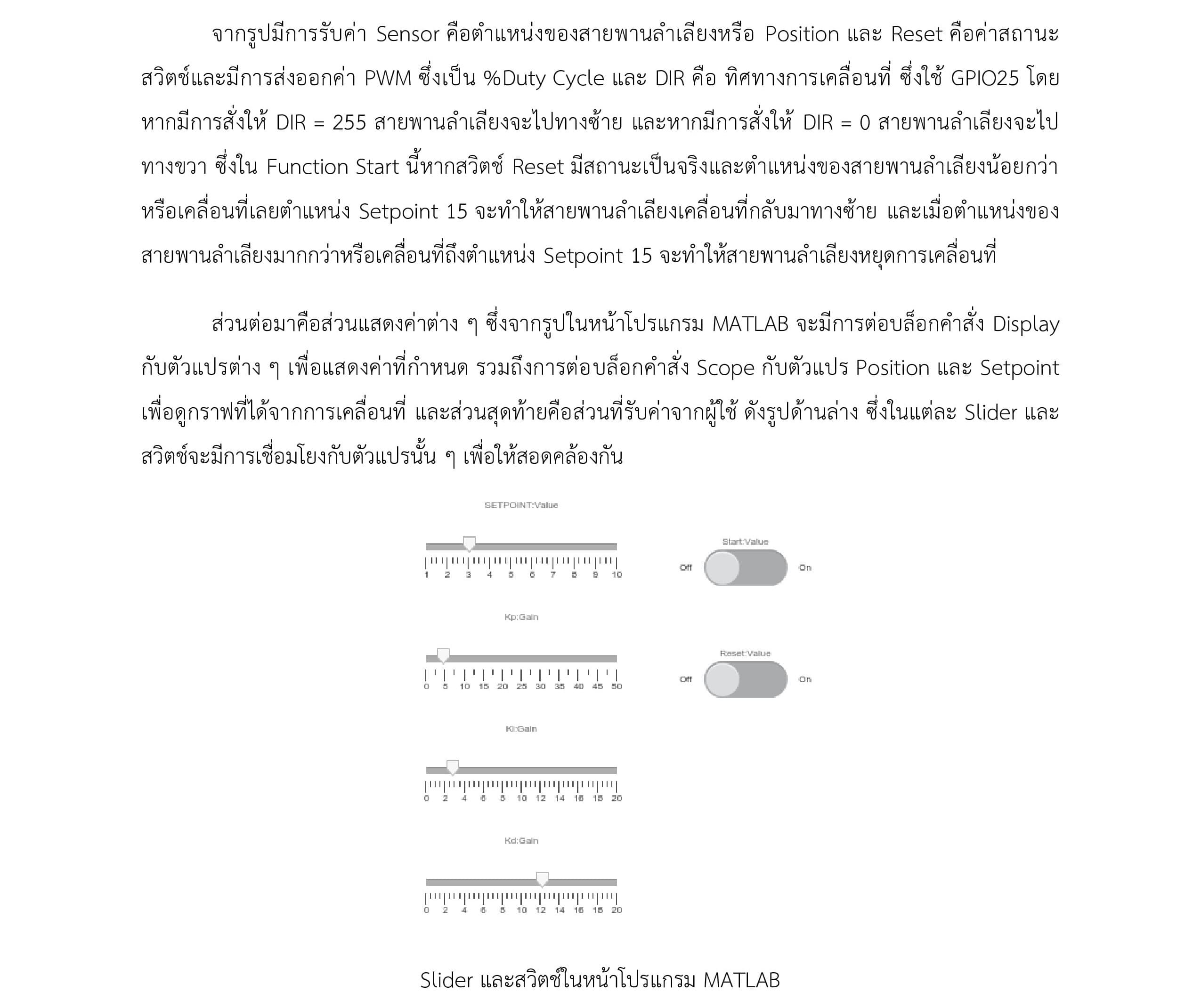
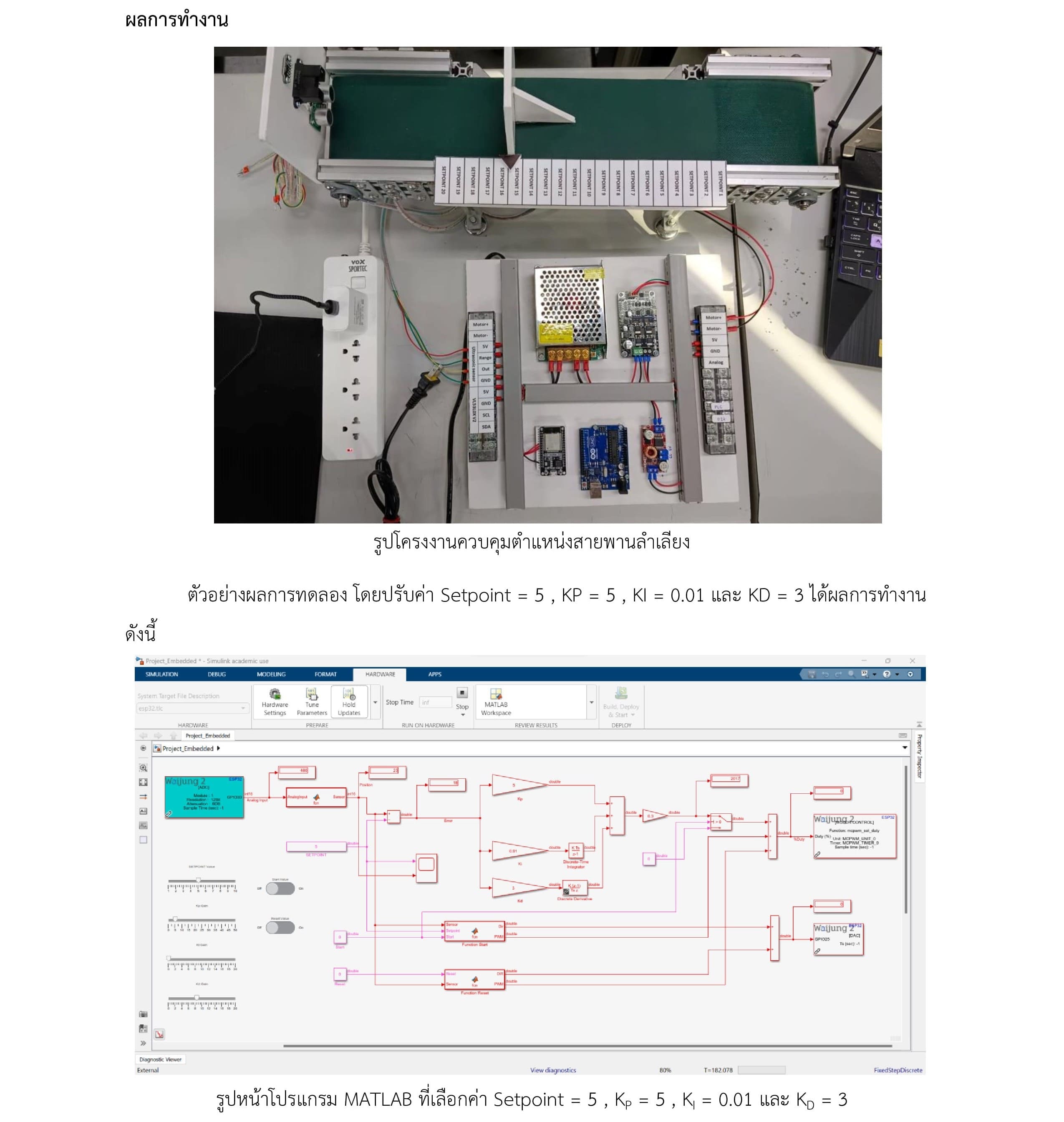
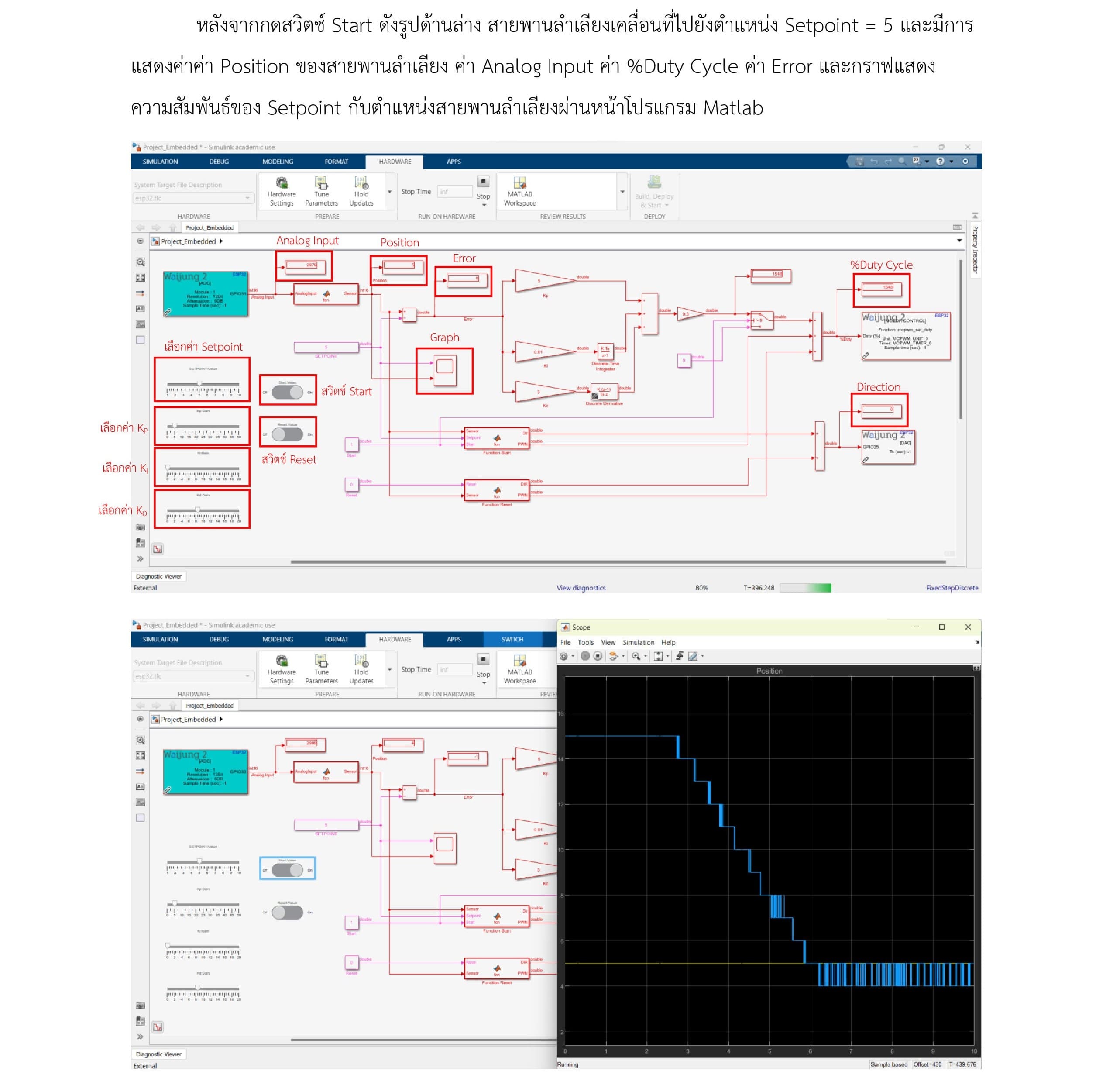
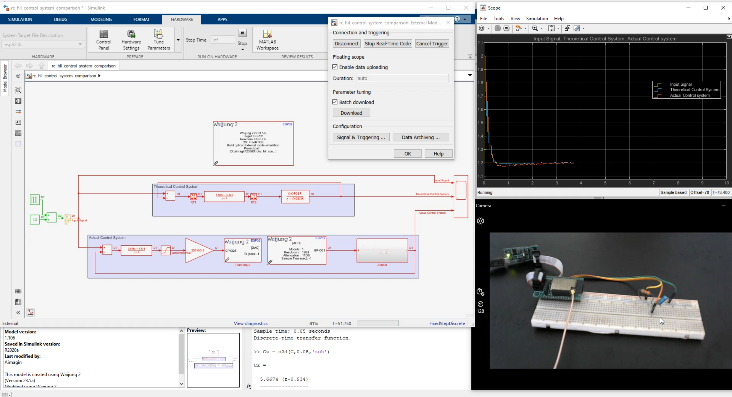
An example of a student project from King Mongkut's University of Technology North Bangkok, Miss Arisa Pannamaneelak and Ms. Napassanan Boonto, who used MATLAB/Simulink and Waijung 2 for ESP32 to study the position control of the conveyor belt. It uses a PID control system and can be operated via MATLAB/Simulink application. To control the position of the conveyor belt to move to the position according to the selected setpoint and can adjust the KP, KI and KD values via Start and Reset switches, including displaying the position of the conveyor belt, analog input values, % Duty Cycle values, Error values and Graph showing the relationship of Setpoint with the conveyor belt position through the MATLAB program page.
Those who are interested in Motor Control using Model-Based Design like should apply and give Waijung 2 for ESP32 a try!
การลำเลียงสินค้าผ่านเครื่องจักรเป็นที่นิยมสำหรับการทำงานในระบบอุตสาหกรรม มากกว่าการใช้คนลำเลียง เนื่องจากมีความสะดวก ต่อเนื่องและแม่นยำ สามารถลำเลียงสินค้าได้สม่ำเสมอ เมื่อมองย้อนกลับไปที่ต้นทาง การที่เครื่องจักรเหล่านี้จะทำงานได้ตามต้องการนั้น จะต้องมีการป้อนโปรแกรมการทำงาน และการจะป้อนโปรแกรมที่ผ่านการคิดระบบมาเป็นอย่างดีจากวิศวกรเข้าไปในเครื่องจักรให้ง่าย สะดวก และรวดเร็วเหมือนการทำงานของเครื่องจักร Waijung 2 for ESP32 ก็เป็นตัวช่วยที่น่าสนใจ
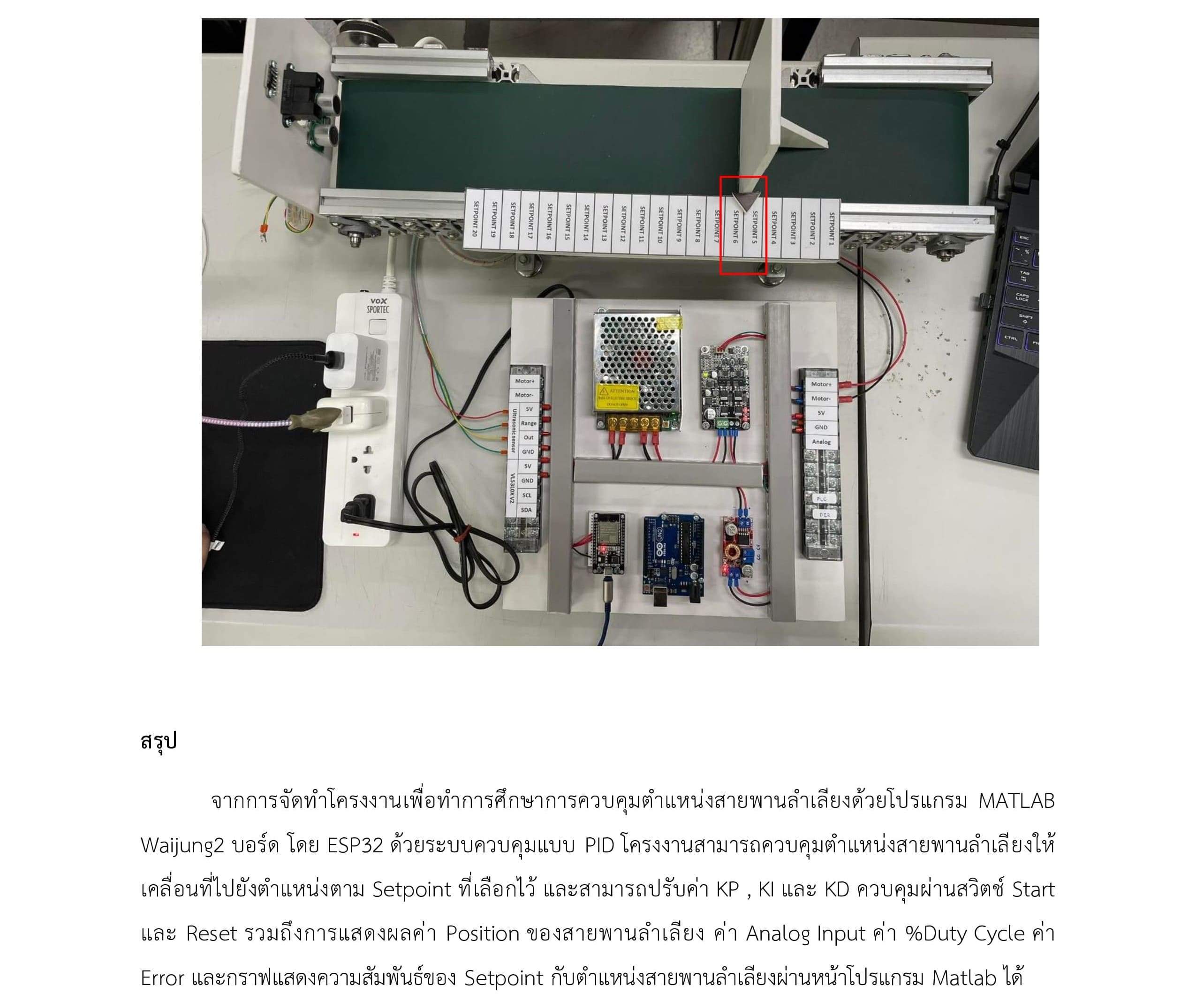
ตัวอย่างโปรเจกต์ของนักศึกษามหาวิทยาลัยเทคโนโลยีพระจอมเกล้าพระนครเหนือ นางสาวอริสา พรรณมณีลักษณ์ และนางสาวนภัสนันท์ บุญโต ที่ใช้ Matlab/Simulink และ Waijung 2 for ESP32 ศึกษาการควบคุมตำแหน่งของสายพานลำเลียง ใช้ระบบควบคุมแบบ PID และสามารถสั่งงานผ่านแอปพลิเคชัน สามารถควบคุมตำแหน่งสายพานลำเลียงให้เคลื่อนที่ไปยังตำแหน่งตาม Setpoint ที่เลือกไว้ และสามารถปรับค่า KP , KI และ KD ควบคุมผ่านสวิตช์ Start และ Reset รวมถึงการแสดงผลค่า Position ของสายพานลำเลียง ค่า Analog Input ค่า %Duty Cycle ค่า Error และกราฟแสดงความสัมพันธ์ของ Setpoint กับตำแหน่งสายพานลำเลียงผ่านหน้าโปรแกรม Matlab ได้
ผู้ที่สนใจการ Control Motor โดยใช้ Model-based design แบบนี้ ก็สามารถนำ Waijung 2 for ESP32 ไปประยุกต์ใช้ได้เช่นกัน
Control the Position of the Conveyer Belt
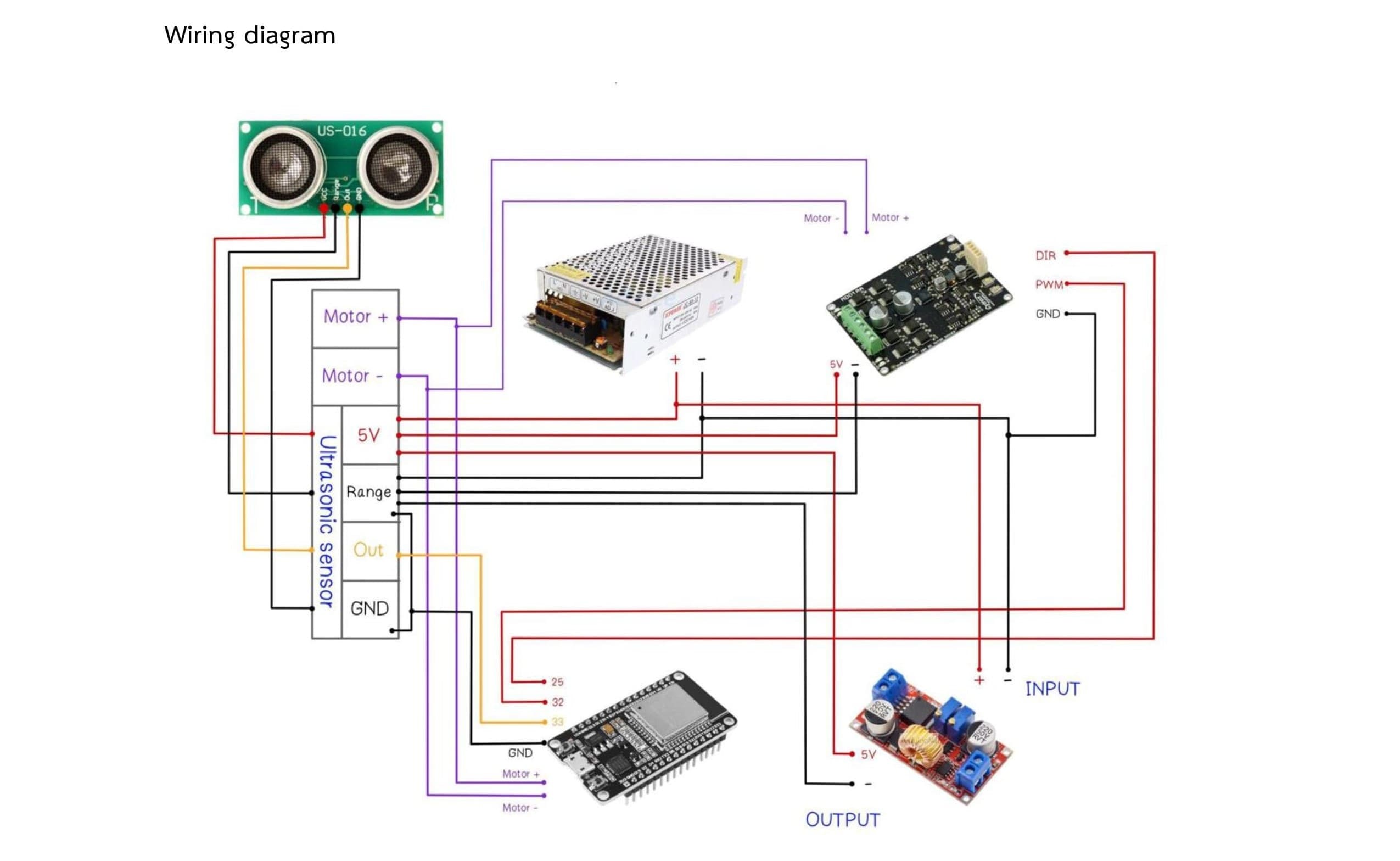
อุปกรณ์ที่ใช้
1. บอร์ดไมโครคอนโทรลเลอร์ ESP32
2. เซนเซอร์วัดระยะทางด้วยแสงเลเซอร์ VL53L0X V2
3. ชุดสายพานลำเลียง
4. บอร์ด Driver Motor
5. ไม้บรรทัด
6. Step Down LM2596
7. Switching Power Supply 24V 3A

Recent Posts
-
 Aimagin IoT Solution
Aimagin IoT Solution
-
 Aimagin Analytics KPI - แนะนำระบบติดตามและประเมินตัวชี้วัด (KPI)
Aimagin Analytics KPI - แนะนำระบบติดตามและประเมินตัวชี้วัด (KPI)
-
 Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (Balancing robot controller project-based learning)
Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (Balancing robot controller project-based learning)
-
 Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (RC-circuit controller project-based learning)
Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (RC-circuit controller project-based learning)
-
 Project 1B "Deploying Simulink and State flow to ESP32 using Waijung 2"
Project 1B "Deploying Simulink and State flow to ESP32 using Waijung 2"



