Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (Balancing robot controller project-based learning)
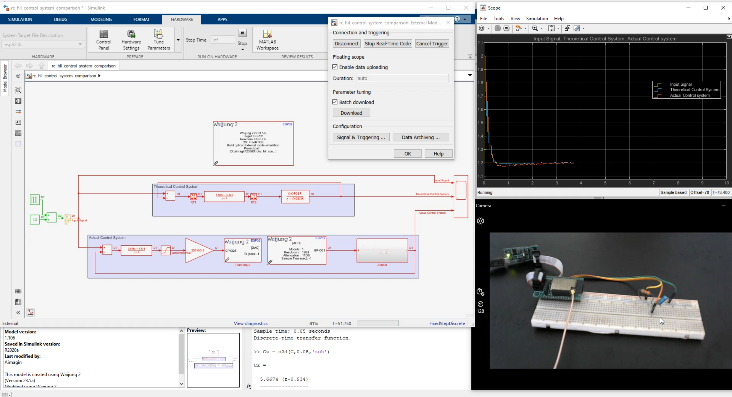
Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (Resistor Capacitor circuit project-based learning)
Mahidol University and Aimagin Co.,Ltd. is honored to invite you to join the Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (Balancing robot controller project-based learning).
Target audiences: Lecturers and researchers in Automatic Control System, Model-Based Design (MBD), and Internet of Things (IoT).
Training objectives:
1. Understand how to use MDB tools to design a complex control system.2. Understand how to develop embedded firmware to read sensor (Inertia Measurement Unit - IMU) and to control motors.
3. Understand how to design a complex control algorithm and tune a PID controller.
4. Understand how to implement a web application to remotely control a device using drag and drop tools (Aimagin Analytics and Aimagin Connect).
Schedule: 2 days (6 March 2024 and 7 March 2024).
Place: Building 3 (Red building) 3thFloor Room 6373 Faculty of Engineering, Mahidol University (Salaya).
Language: English (No translation will be provided).
Cost: Free
Number of on-site attendees: Maximum 10 people.
Online attendance: To be determined.
Lunch and break: Provided by the organizer.
Training materials: Balancing robot with Waijung 2 for ESP32
For attendees to prepare:
1. Attendees must bring their own notebooks to the training.2. All software and hardware will be provided by the organizer. (The following software is required. MATLAB 2022b, Simulink, Matlab Coder, Simulink Coder, Embedded Coder, Stateflow, Control System toolbox, Waijung 2 for ESP32, Aimagin Connect). Instructions to prepare the software will be provided before the training.
3. If you are interested in joining, please register using this form. Reservation is first come first served only. So, register as soon as possible.
Schedule:
6 March 2024
08:30 – 09:00 Registration.
09:00 – 09:15 Welcome message
09:15 – 10:00 Introduction, software and hardware preparation.
10:00 – 10:30 Coffee break
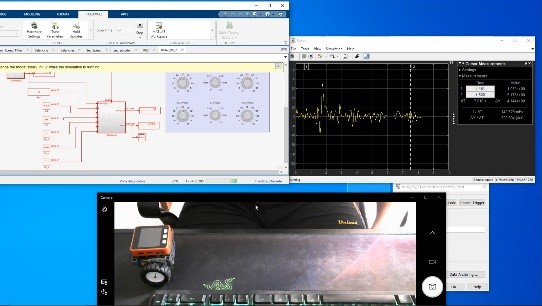
10:30 – 12:00 Develop a Simulink model to read IMU sensor, compute tilt angle, and perform wireless (Wifi) Hardware-in-the-Loop (HIL) test.
12:00 – 13:00 Lunch break
13:00 – 15:00 Develop a Simulink model to control motors, tune a PID controller using HIL test, so that the robot can remain upright.
15:00 – 16:30 Develop and simulate a control algorithm to control the robot forward and turn movement.
7 March 2024
09:00 – 10:00 Test control robot movement (forward, backward, left turn, and right turn) using HIL.
10:00 – 10:30 Coffee break
10:30 – 12:00 Create a web application to control the robot using drag and drop technique.
12:00 – 13:00 Lunch break
13:00 – 16:30 Create a stand-alone system that integrates the control algorithm and the web application.
Download PDF here
Recent Posts
-
 Aimagin IoT Solution
Aimagin IoT Solution
-
 Aimagin Analytics KPI - แนะนำระบบติดตามและประเมินตัวชี้วัด (KPI)
Aimagin Analytics KPI - แนะนำระบบติดตามและประเมินตัวชี้วัด (KPI)
-
Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (Balancing robot controller project-based learning)
-
 Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (RC-circuit controller project-based learning)
Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (RC-circuit controller project-based learning)
-
 Project 1B "Deploying Simulink and State flow to ESP32 using Waijung 2"
Project 1B "Deploying Simulink and State flow to ESP32 using Waijung 2"



