Design Adaptive Fuzzy Sliding Mode Controller for Pantograph Mechanism Apply to Massage Therapy Robot for Healthcare
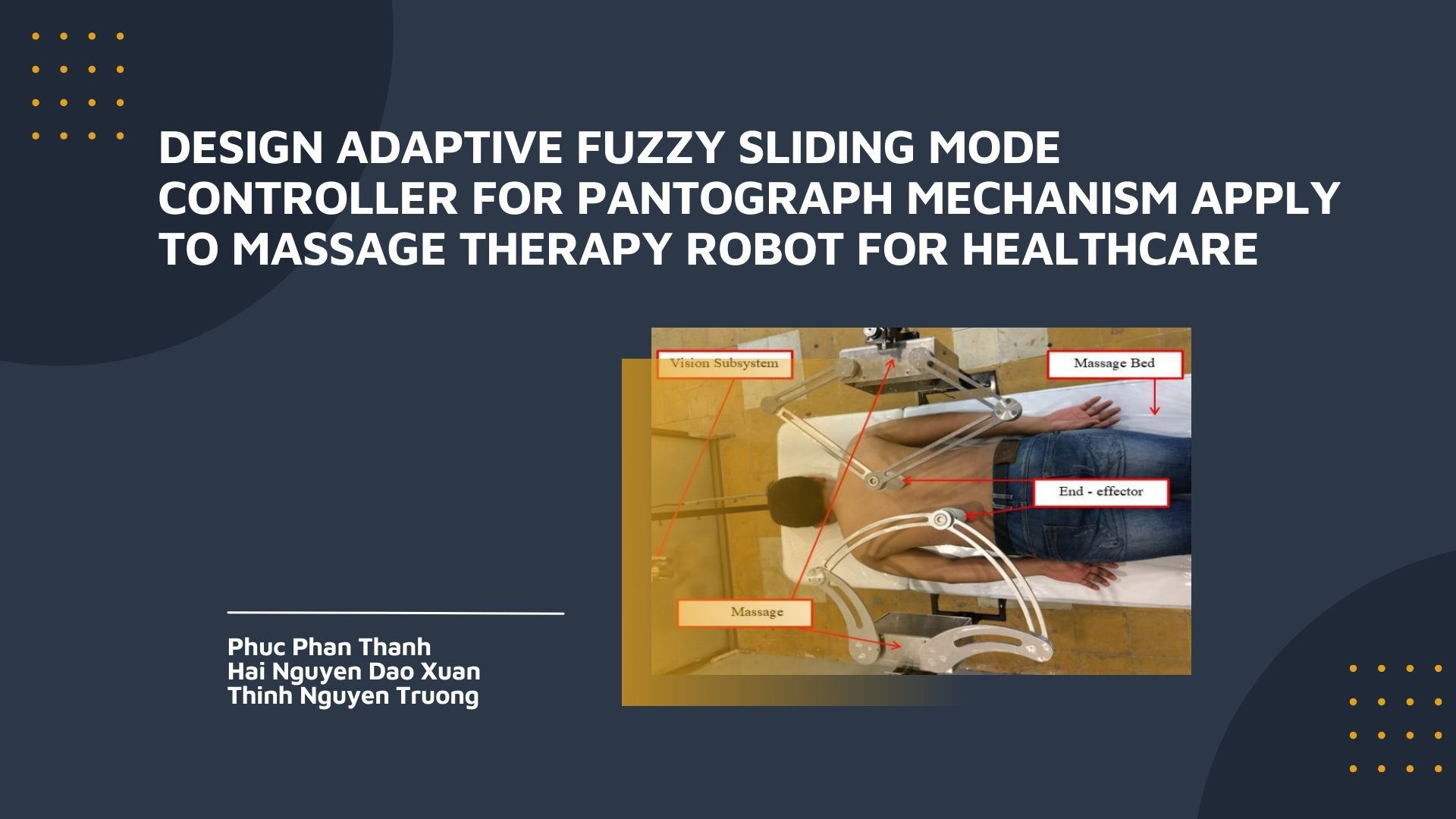
| Abstract | This paper proposes an adaptive fuzzy sliding mode controller (AFSMC) for pantograph haptic device. It has form mechanism with a 2-DoF redundancy actuated parallel robotic manipulator. An adaptive single input single output (SISO) fuzzy system is applied to calculate each element of the control gain vector in a sliding mode controller for purport to reject phenomenon chattering by the constant value of K and discontinuous function. The adaptive laws are designed based on the Lyapunov stability theory method. The adaptive laws are practiced online by fuzzy controller combine with the sliding mode control (SMC) to control stability the robot manipulator despite external forces disturbance. Many operation situations such as set point control also the trajectory control are simulated also experiment to demonstrate the operation controllers are good working. |
| Item Type | Journal Article |
| Title | Design Adaptive Fuzzy Sliding Mode Controller for Pantograph Mechanism Apply to Massage Therapy Robot for Healthcare |
| Author | Phuc Phan Thanh Hai Nguyen Dao Xuan Thinh Nguyen Truong |
| Publication | Journal of Automation and Control Engineering |
| Page | 13-23 |
| Date | 2017 |
| Journal Abbr | JOACE |
| ISSN | 23013702 |
| Language | English |
| URL | http://www.joace.org/index.php?m=content&c=index&a=show&catid=70&id=417 |
| Library Catalog | DOI.org (Crossref) |
| Tags | sliding mode control, lyapunov stability, adaptive fuzzy control, chattering |
Related Posts
-
 Development Of An Experiment Set For Embedded System Education And Analyzing Its Contribution
Development Of An Experiment Set For Embedded System Education And Analyzing Its Contribution
-
 Assessment of Several PID Controllers Applied to DC Motors
Assessment of Several PID Controllers Applied to DC Motors
-
 Model Based System Design of Conceptual Drive-by-Wire ECU Functions for Electric Vehicle Conversion
Model Based System Design of Conceptual Drive-by-Wire ECU Functions for Electric Vehicle Conversion
-
 Adaptive Active Disturbance Rejection Control of Solar Tracking Systems with Partially Known Model
Adaptive Active Disturbance Rejection Control of Solar Tracking Systems with Partially Known Model
Related Products
-
 Waijung 2 for ESP32As low as ฿0.00
Waijung 2 for ESP32As low as ฿0.00
Recent Posts
-
 Aimagin IoT Solution
Aimagin IoT Solution
-
 Aimagin Analytics KPI - แนะนำระบบติดตามและประเมินตัวชี้วัด (KPI)
Aimagin Analytics KPI - แนะนำระบบติดตามและประเมินตัวชี้วัด (KPI)
-
 Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (Balancing robot controller project-based learning)
Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (Balancing robot controller project-based learning)
-
 Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (RC-circuit controller project-based learning)
Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (RC-circuit controller project-based learning)
-
 Project 1B "Deploying Simulink and State flow to ESP32 using Waijung 2"
Project 1B "Deploying Simulink and State flow to ESP32 using Waijung 2"



