Development of a Nonlinear Mechatronic Cube
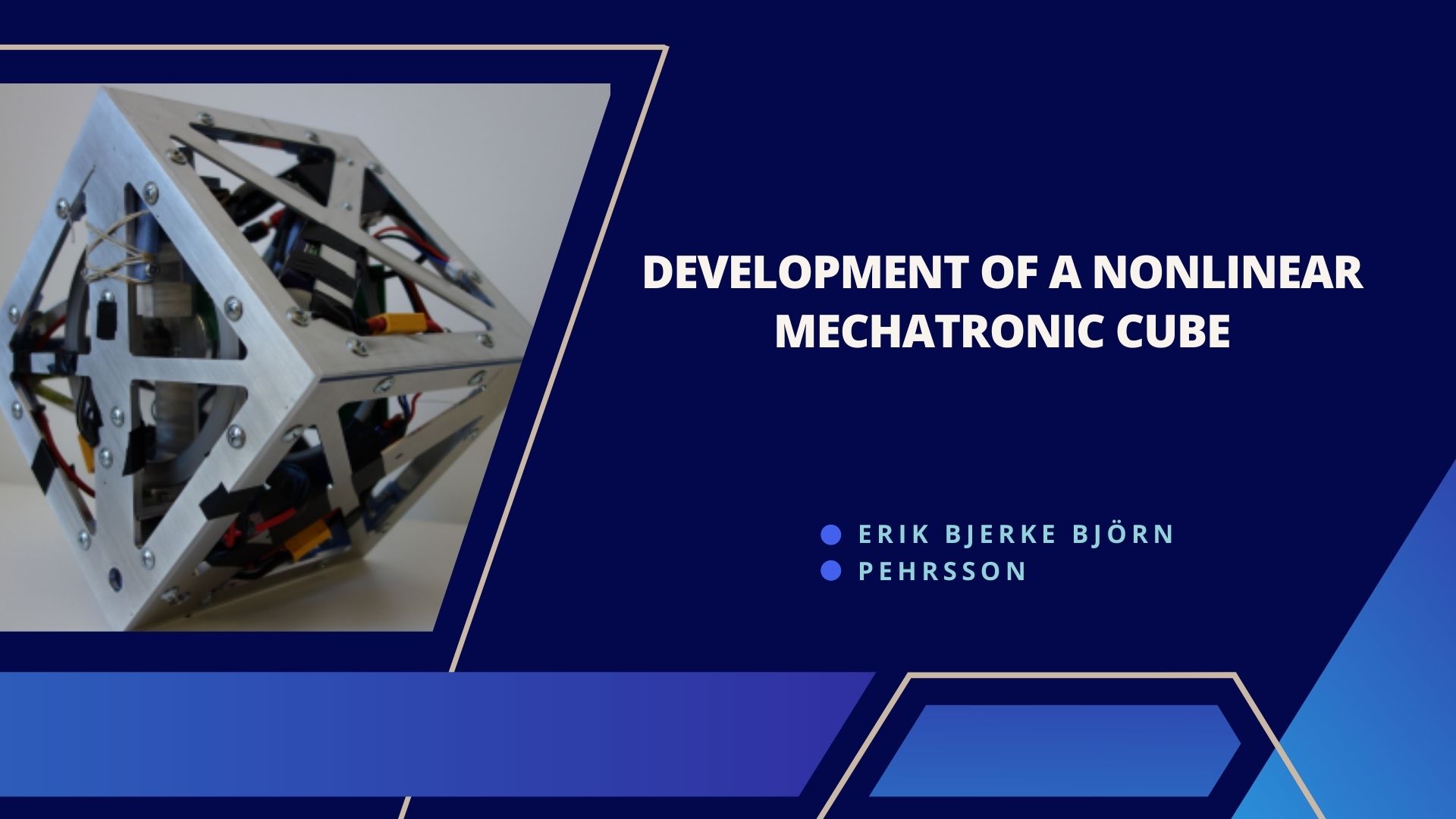
| Abstract | The goal of the project is to develop and construct a nonlinear mechatronics cube which is able to jump up from the surface to one of its edges and balance. The mechanical part of the cube was developed using the softwares CATIA V.5 and MATLAB/Simulink. The final cube is controlled by an LQR-controller with added integral states. The code was implemented using the software Waijung, which translated MATLAB/Simulink code to C-code. The cube was able to balance on any surface and could resist small pushes up to 2 degrees. It also managed to successfully jump up and balance 4 out of 25 times. |
| Item Type | Journal Article |
| Title | Development of a Nonlinear Mechatronic Cube |
| Author | Erik Bjerke Björn Pehrsson |
| Page | 69 |
| Date | 2016 |
| Language | English |
| URL | https://publications.lib.chalmers.se/records/fulltext/233543/233543.pdf |
| Tags | LQR, balancing cube, SIMULINK, Control theory, embedded systems |
Related Posts
-
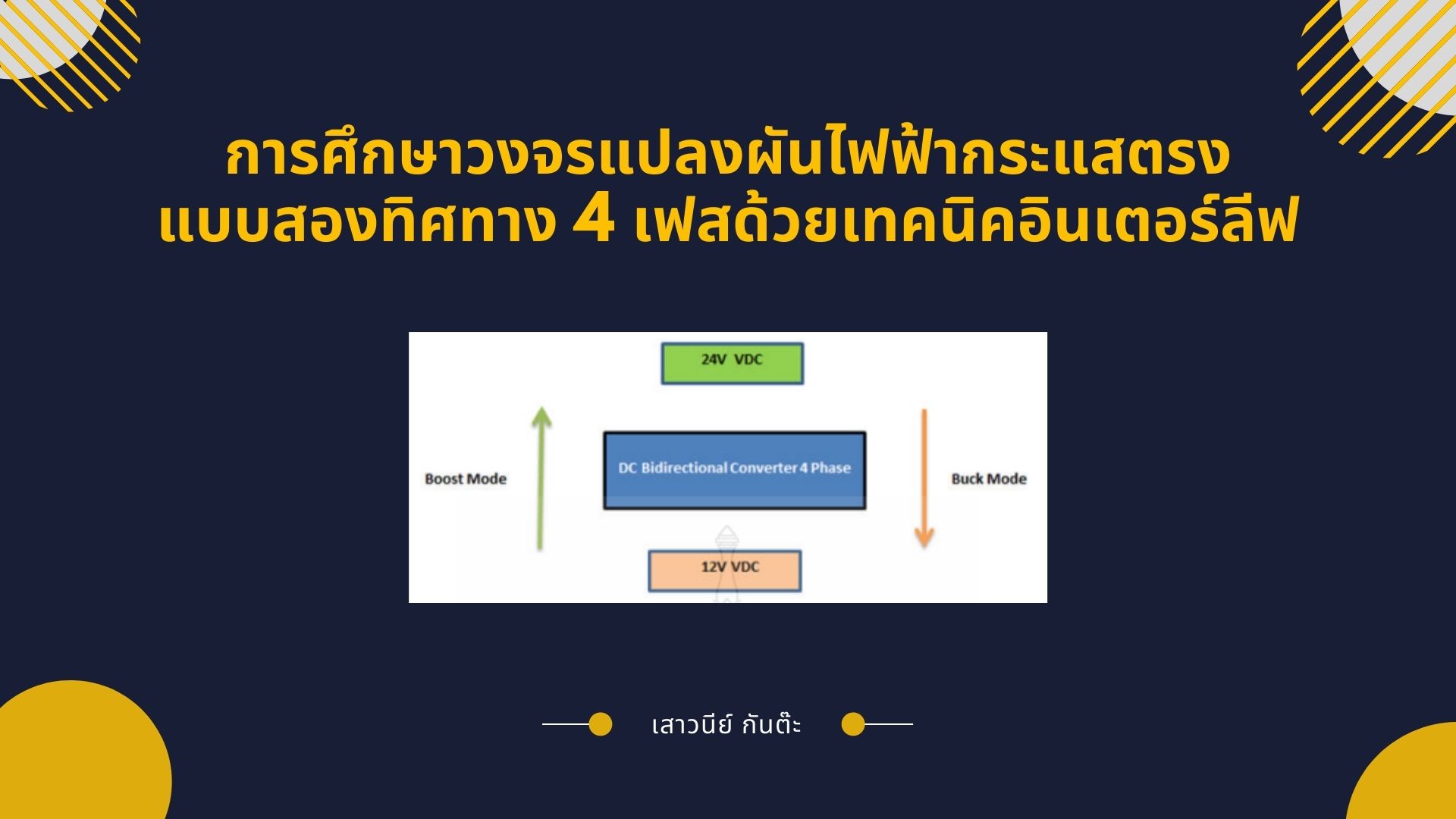 การศึกษาวงจรแปลงผันไฟฟ้ากระแสตรงแบบสองทิศทาง 4 เฟสด้วยเทคนิคอินเตอร์ลีฟ
การศึกษาวงจรแปลงผันไฟฟ้ากระแสตรงแบบสองทิศทาง 4 เฟสด้วยเทคนิคอินเตอร์ลีฟ
-
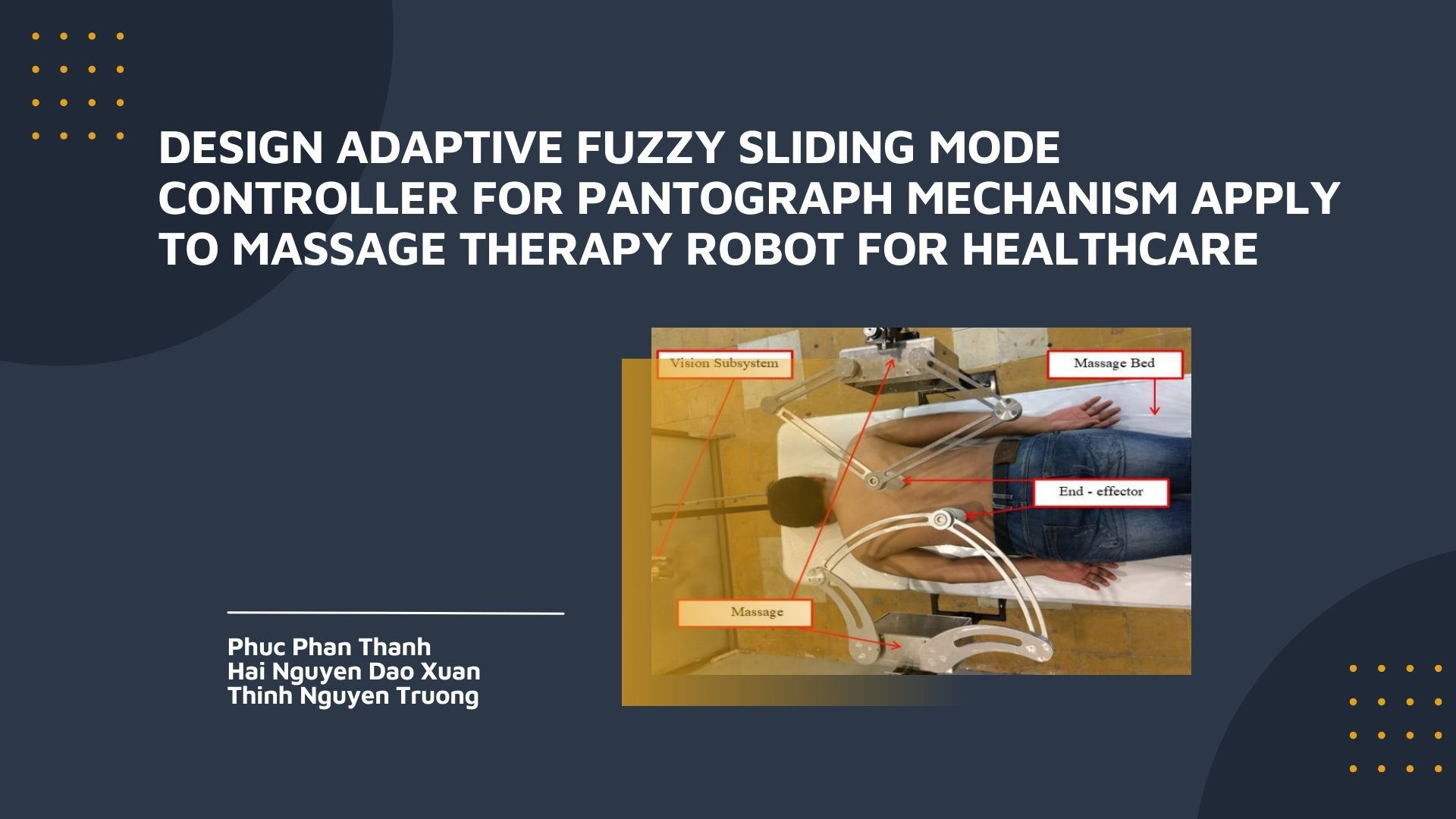 Design Adaptive Fuzzy Sliding Mode Controller for Pantograph Mechanism Apply to Massage Therapy Robot for Healthcare
Design Adaptive Fuzzy Sliding Mode Controller for Pantograph Mechanism Apply to Massage Therapy Robot for Healthcare
-
 Indoor 3D Reconstruction Using Camera, IMU and Ultrasonic Sensors
Indoor 3D Reconstruction Using Camera, IMU and Ultrasonic Sensors
-
 A Lowcost Hardware In Loop Simulator for Classic Controls Experiments
A Lowcost Hardware In Loop Simulator for Classic Controls Experiments
Related Products
-
 Waijung 2 for ESP32As low as ฿0.00
Waijung 2 for ESP32As low as ฿0.00
Recent Posts
-
 Aimagin IoT Solution
Aimagin IoT Solution
-
 Aimagin Analytics KPI - แนะนำระบบติดตามและประเมินตัวชี้วัด (KPI)
Aimagin Analytics KPI - แนะนำระบบติดตามและประเมินตัวชี้วัด (KPI)
-
 Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (Balancing robot controller project-based learning)
Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (Balancing robot controller project-based learning)
-
 Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (RC-circuit controller project-based learning)
Internet of Things (IoT) Feedback Control with Model-Based Design and Waijung 2 for ESP32 Workshop (RC-circuit controller project-based learning)
-
 Project 1B "Deploying Simulink and State flow to ESP32 using Waijung 2"
Project 1B "Deploying Simulink and State flow to ESP32 using Waijung 2"



